Вот задумался про него. Угол атаки к ветру автопилоту я не доверяю а вот для выравнивания змея (падение в край ветроокна) я бы ему доверил. Думаю про рычаги и подвешанный груз. Ну как идея? или ее забросить как нереализуюмую на рычагах? Электронику не предлагать-дорого и ненадёжно.
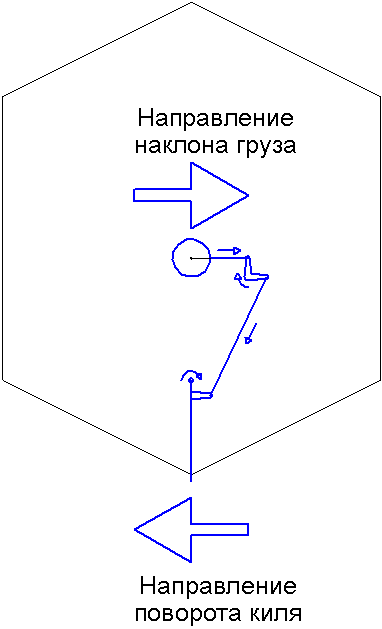
При отклонении змея в бок на сильный угол груз смещается и поворачивает хвост в туже сторону и зад змея заварачивает и начинается подьём из края ветрового окна.
Андрей, есть у меня некоторые мысли по этому вопросу, но дай пожалуйста немного времени чтоб я подготовил в картинках. На это пока не могу переключиться так как сейчас делаю одну интересность и в неё ушёл с головой. Как сделаю или хотя бы в перерывчик, обязательно поделюсь здесь своей идеей. В любом случае это тоже мне нужно будет для капа, поэтому я и прорабатываю такой вариант стабилизации змея.
много ни как, Нибиру в следующем году уже прилетает, так что максимум год. Шутка. Если серьёзно, то работы осталось немного, основное уже сделано. Сервмашинки задерживают, без них не могу начать собирать корпус.
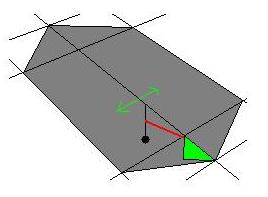
Пока затишье, сервушки где то застряли в просторах почтовых, хочу по демогогствовать Андрей, по поводу без электронья: в теории такой рычаг исполним. Если например змей наклонился в лево рычаг с грузом естественно будет стремиться встать перпендикулярно земле. По мере наклона этот рычаг будет тянуть закрылок до той степени пока змей не выравниться. Аналогичное действие будет происходить в обратную сторону.
Это всё теория... Теперь стоит немного задуматься. Ну допустим как то на тряпичной основе мы закрепим систему рычажков, но вот какой вес должен иметь груз чтоб он нормально повернул киль? А ведь мы боремся за каждый грамм веса змея... Сам груз будет иметь какую то парусность значит его будет раскачивать не в нужный момент... Можно ещё найти кучу погрешностей которые будут отвергать подобный способ стабилизации.
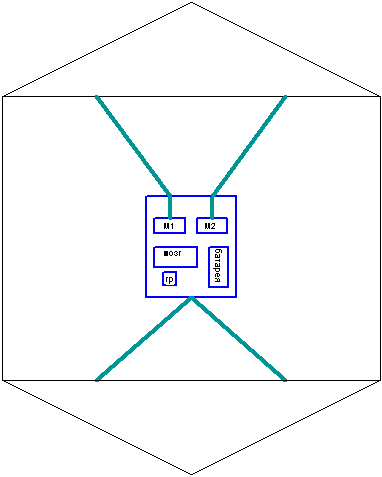
Что касается электроники? Достаточно потянуть за один из лучей уздечки и змей начнёт выполнять движение в нужную сторону. Для управления влево/вправо достаточно одного двигателя, для изменения угла атаки ещё одного, плюс мозги, плюс питание. Две сервы весят не более 100 гр, мозги весят 50 гр, гироскоп весит 15 гр, аккумулятор около 200 гр, итого 365 гр. Причём хочу обратить ваше внимание, что упомянутые сервы могут вытянуть до 8 кг, то есть змейчика можно смело делать приличных размеров, что в лёгкую будет держать наши 365 гр. Цена за всё около 1500 рубл, если покупать всё в готовом состоянии, но можно уложиться и дешевле если собирать самому. Надёжность? Вся сборка очень простая, а мы знаем чем проще тем надёжней
Не вижу смысла бояться электроники, тем более вы Андрей в лёгкую сами платы делаете.
Вот что делает маленькая платка под названием Arduino
А в истории змеестроения автопилот применялся? или без него обходились?
Очень много роликов есть на ютубе где используется автопилот для воздушных змеев, ссылку с ходу не могу дать но встречал часто. В основном змеи используются в технических целях: выработка электроэнергии или тяговые функции. Недавно введён немцами в использование тяговый воздушный змей для передвижения судов сухогрузов, на нём стоит как раз автопилот.
Quote (Андрей01)
У нас в Перми гироскоп будет дороже стоить. Сервы по 700р-1шт. Аккамулятор-1500 и более р.-1 шт
О, нет однозначно покупать в магазинах не советую, у нас такая же картина. Нужно заказывать в интернете. Скажем 2 сервы мне обошлись где то в триста рублей, мозги 1050 рубл плюс пересылка 500 рубл (сделал ошибку надо было рассчитываться через вебмани а не наложенным платежом, пересылка обошлась бы в 200 рубл) и мозги можно дешевле найти. Гироскоп можно сделать самому из двух переменных резисторов, как по подобию жёстика, а не с крутящимся маховиком. Сервы к стати не совсем здесь уместны, лучше простые двигатели с редукторами. Металисты у нас по сто рублей продают.









 и в неё ушёл с головой. Как сделаю или хотя бы в перерывчик, обязательно поделюсь здесь своей идеей. В любом случае это тоже мне нужно будет для капа, поэтому я и прорабатываю такой вариант стабилизации змея.
и в неё ушёл с головой. Как сделаю или хотя бы в перерывчик, обязательно поделюсь здесь своей идеей. В любом случае это тоже мне нужно будет для капа, поэтому я и прорабатываю такой вариант стабилизации змея.