|
Постройка рига роботизированного
|
|
| Андрей01 | Дата: Вторник, 22.10.2013, 18:06 | Сообщение # 1 |

Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
| Сама рама будет из ..............., на наклон и поворот и нажатие на спуск будут приделаны сервы маленькие.
Пока вопросы по раме -
1- вид рамы (ажурная как у Сергея или из прутков и линеек как у других (у меня)).??
2- Делать ли бокс для укрытия от холода всего рига (типа шубы). ??
Пока вот такие вопросы.
Сообщение отредактировал Андрей01 - Вторник, 22.10.2013, 18:08 |
| |
| |
| Андрей01 | Дата: Среда, 23.10.2013, 11:06 | Сообщение # 2 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
|  Добавлено (23.10.2013, 05:12)
---------------------------------------------
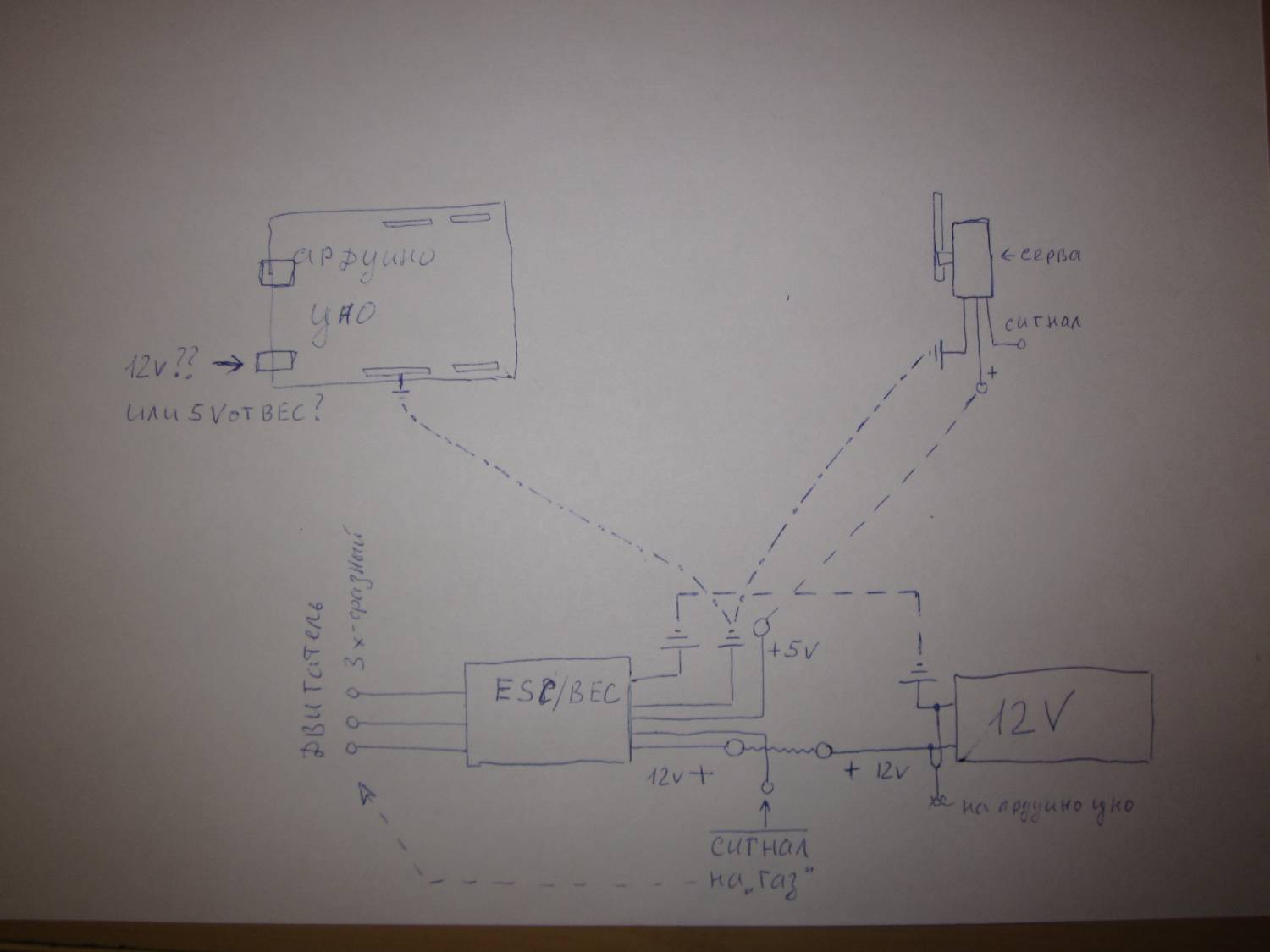
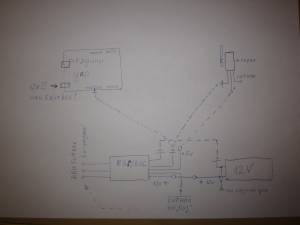
Вопрос - правильно ли я подключаю ардуинку? или для неёё надо ещё отдельное питание. Добавлено (23.10.2013, 11:06)
---------------------------------------------
Второй вопрос отпал, сам всё нашёл и запрограммировал, подключил. Вот видео http://youtu.be/WGY6zTRFAU0
|
| |
| |
| Sergey | Дата: Среда, 23.10.2013, 16:50 | Сообщение # 3 |
 Admin
Группа: Банить не буду
Сообщений: 2681
Награды: 7
Статус: Offline
Город: Владивосток
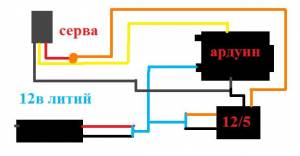
| Андрей, во первых Вы на ролике запитали Ардуину через юсб от компьютера. А вообще в штекер питающий рекомендуется подавать напряжение от 7V до 12V (предельное 6-20V) читайте спецификацию А на серву лучше подавать то напряжение которое указано у неё в паспорте  иначе сожжёте. Для понижения напряжения существуют преобразователи Если б вы использовали только одну микро серву то можно было бы запитаться от самой Ардуину с пина 5V или 3.3V, но этого же не будет и использовать я так предполагаю будете сервы и на повороты. иначе сожжёте. Для понижения напряжения существуют преобразователи Если б вы использовали только одну микро серву то можно было бы запитаться от самой Ардуину с пина 5V или 3.3V, но этого же не будет и использовать я так предполагаю будете сервы и на повороты.
На своём риге я запитывал сервы на прямую от аккумулятора 7.4V, сами внутренние контролеры серв вроде выдерживают, а вот на ихние двигатели можно программно задавать напряжение (если конечно сервы переделаны под постоянное вращение). С не переделанными такое не прокатит.
|
| |
| |
| Андрей01 | Дата: Четверг, 24.10.2013, 02:11 | Сообщение # 4 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
|  Добавлено (24.10.2013, 02:11)
---------------------------------------------
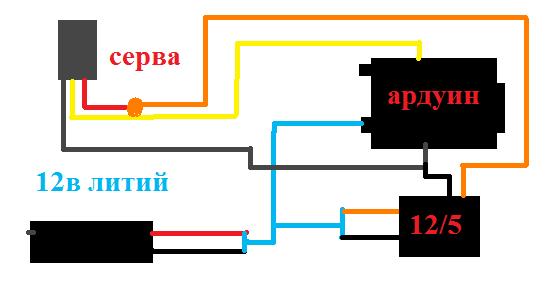
Схема такая, всё работало. Только ардуино от юсби была запитана.
|
| |
| |
| Sergey | Дата: Четверг, 24.10.2013, 21:42 | Сообщение # 5 |
|
Admin
Группа: Банить не буду
Сообщений: 2681
Награды: 7
Статус: Offline
Город: Владивосток
| А, ну да, так верно.
|
| |
| |
| Андрей01 | Дата: Понедельник, 28.10.2013, 06:06 | Сообщение # 6 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
| Итак определился с дизайном рига, увы будет прямоугольником. Вопрос к Сергею-можете скеч скинуть? если что то можно в личку. Я пока думаю над кодом и элементами управления сервами, если есть примеры плавного пуска (скорость) поворота сервы то киньте ссылку, спасибо.
Добавлено (27.10.2013, 05:35)
---------------------------------------------
Спасибо сам нащёл на этом форуме нужную инфу, наверное надо по ардуино отдельно сделать топик или что то ещё.
Добавлено (28.10.2013, 05:44)
---------------------------------------------
Вот такой скеч сейчас пробую, всё работает но надо сделать от датчика (контакта) наклон платформы, кто может дать скеч или описать алгоритм действий??
#include <Servo.h> // Подключаем библиотеку
Servo motor; // Создоём инстанцию нашей сервомашинки
uint8_t servo = 9; // Пин к которому подключена серва
uint8_t pos = 0; // Позиция сервы в градусах
void setup(){
motor.attach(servo); // Указываем на каком пине сидит серва
}
void loop(){
// Устанавливаем серву "servo" на позицию "pos"
motor.write(pos);
// Увеличивать позицию на 5° через каждый шаг
// После того как позиция превысит 45° установить её на 45°
if((pos+=5)>45) pos=45;
delay(100);
}Добавлено (28.10.2013, 06:06)
---------------------------------------------
Есть такой скеч, только как его подружить с серво приводом???
/*
Кнопка
Включаем и выключаем светодиод нажатием кнопки.
created 2005
by DojoDave <http://www.0j0.org>
modified 28 Oct 2010
by Tom Igoe
This example code is in the public domain.
*/
// задаем константы
const int buttonPin = 2; // номер входа, подключенный к кнопке
const int ledPin = 13; // номер выхода светодиода
// переменные
int buttonState = 0; // переменная для хранения состояния кнопки
void setup() {
// инициализируем пин, подключенный к светодиоду, как выход
pinMode(ledPin, OUTPUT);
// инициализируем пин, подключенный к кнопке, как вход
pinMode(buttonPin, INPUT);
}
void loop(){
// считываем значения с входа кнопки
buttonState = digitalRead(buttonPin);
// проверяем нажата ли кнопка
// если нажата, то buttonState будет HIGH:
if (buttonState == HIGH) {
// включаем светодиод
digitalWrite(ledPin, HIGH);
}
else {
// выключаем светодиод
digitalWrite(ledPin, LOW);
}
}
Сообщение отредактировал Андрей01 - Понедельник, 28.10.2013, 05:45 |
| |
| |
| Sergey | Дата: Вторник, 29.10.2013, 14:09 | Сообщение # 7 |
|
Admin
Группа: Банить не буду
Сообщений: 2681
Награды: 7
Статус: Offline
Город: Владивосток
| Первый скетч: серва дёргается как не нормальная, этот скетч не годится для перемещения камеры, сорвёте все со временем зубья в серве или камера выпрыгнет И используйте лучше не градусное изменение значения, а шимовское servo_vert.writeMicroseconds(600) -> servo_vert.writeMicroseconds(2000). Только найдите крайние значения для своей сервы, начинайте например с 600 и опускайтесь пока не перестанет серва дёргатся, также с верхним значением от 2000 и выше... Вот скетч для опыта:
Код #include <Servo.h>
Servo servo_gor; // создаём объект для контроля сервы вертикального поворота
int val;
//----
void setup()
{
servo_gor.attach(9); // подключаем серву горизонтальную к пину 9
//----
Serial.begin(9600); // будем записывать в COM-порт
}
void loop()
{
servo_gor.writeMicroseconds(2005);
delay(1000);
servo_gor.writeMicroseconds(2000);
delay(1000);
}
Второй скетч: зачем Вам его дружить с сервой? Это скетч для включения выключения свето диода с помощью кнопки.Добавлено (29.10.2013, 14:09)
---------------------------------------------
Первый скетч: серва дёргается как не нормальная, этот скетч не годится для перемещения камеры, сорвёте все со временем зубья в серве или камера выпрыгнет И используйте лучше не градусное изменение значения, а шимовское servo_vert.writeMicroseconds(600) -> servo_vert.writeMicroseconds(2000). Только найдите крайние значения для своей сервы, начинайте например с 600 и опускайтесь пока не перестанет серва дёргатся, также с верхним значением от 2000 и выше... Вот скетч для опыта:
Код #include <Servo.h>
Servo servo_gor; // создаём объект для контроля сервы вертикального поворота
int val;
//----
void setup()
{
servo_gor.attach(9); // подключаем серву горизонтальную к пину 9
//----
Serial.begin(9600); // будем записывать в COM-порт
}
void loop()
{
servo_gor.writeMicroseconds(2005);
delay(1000);
servo_gor.writeMicroseconds(2000);
delay(1000);
}
Второй скетч: зачем Вам его дружить с сервой? Это скетч для включения выключения свето диода с помощью кнопки.
|
| |
| |
| Андрей01 | Дата: Пятница, 01.11.2013, 09:05 | Сообщение # 8 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
| Спасибо Сергей, вопщем долго думал, играл настройками в ардуино и тут пришла в 5 утра мысль, у меня платформа вращается отдельным движком (своя система) а у неё есть время на оборот вокруг оси (-+ пара секунд). То есть мне надо только узнать за сколько секунд платформа сделает оборот + небольшое перекрытие и дальше серва опустит камеру в низ и снова ждём по времени оборот + небольшое перекрытие, поднимаем камеру в верхнее положение и снова ждём по времени+на перекрытие. Дальше всё повторяется. И не надо мне контакт для переключения позиции сервы. Конечно выползет так называемый сдвиг в сшивке панорамы но думаю птгуй его съест.
Код такой
#include <Servo.h>
Servo myservo;
void setup()
{
myservo.attach(9);
}
void loop()
{
myservo.write(1);
delay(3000);
myservo.write(90);
delay(3000);
myservo.write(179);
delay(3000);
}Добавлено (31.10.2013, 10:28)
---------------------------------------------
Хм интересно тоже, более продвинутые настройки. Поигрался с ним, вот мои данные, есть вопрос - 0 в проге не равен 0 в реальности, как заставить серву докручивать в отрицательную позицию?
void loop()
{
servo_gor.writeMicroseconds(0);
delay(2000);
servo_gor.writeMicroseconds(1450);
delay(2000);
servo_gor.writeMicroseconds(2380);
delay(2000);
} Добавлено (01.11.2013, 08:52)
---------------------------------------------
Вот нарыл нормальный код под сверическую панораму, реально человеки маньяки сидят на форуме....
http://arduino.ru/forum....hinkami Добавлено (01.11.2013, 09:05)
---------------------------------------------
С программой разобрался, теперь осталось самое увлекательное, строить риг новый.
|
| |
| |
| Sergey | Дата: Пятница, 01.11.2013, 11:53 | Сообщение # 9 |
|
Admin
Группа: Банить не буду
Сообщений: 2681
Награды: 7
Статус: Offline
Город: Владивосток
| Вообще то всегда идут с другой стороны, сначала создают механику, а потом под неё пишут программу...
А ноль в той функции которую вы привели, не задаётся. Там ставятся значения для ШИМ модуляции управлением сервами. У разных серв свои минимальные и максимальные значения. Нижний придел где то в районе 600 верхний 2100, а средний 1500. Подбирать нужно опытным путём. Отрицательных значений не бывает. Если серва переделана на постоянное вращение, то 1500 это будет остановка сервы, выше или ниже вращение в одну или в другую сторону. Чем дальше значение от 1500 тем больше подаётся напряжение на моторчик (до придела питающего напряжения) соответственно меняется скорость его вращения.
|
| |
| |
| Андрей01 | Дата: Воскресенье, 03.11.2013, 10:39 | Сообщение # 10 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
| Цитата Sergey (  ) Вообще то всегда идут с другой стороны, сначала создают механику, а потом под неё пишут программу... Добавлено (03.11.2013, 10:39)
---------------------------------------------
Итак набросал схему рига, мда линеек потребуется аж 2метра. Но это пока, скорее будет повышение длины линеек примерно до 2,5м. Теперь думаю над ручным дремлем. А так красивая конструкция получается....
|
| |
| |
| Андрей01 | Дата: Понедельник, 04.11.2013, 13:33 | Сообщение # 11 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
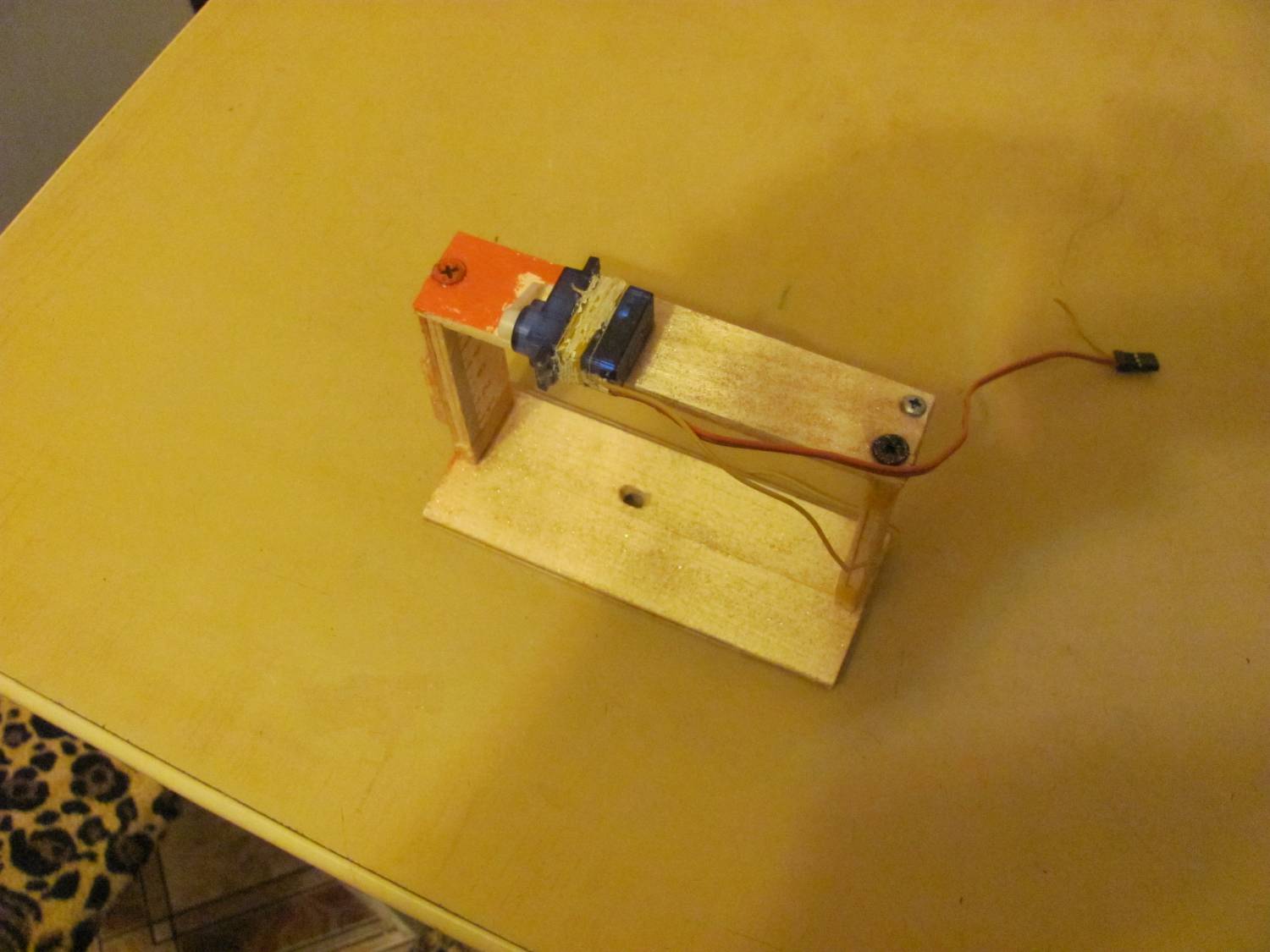
|  Добавлено (04.11.2013, 13:33)
---------------------------------------------
Это пока качели для фотика, основной каркас буду собирать возможно сегодня.......
|
| |
| |
| Андрей01 | Дата: Понедельник, 04.11.2013, 18:19 | Сообщение # 12 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
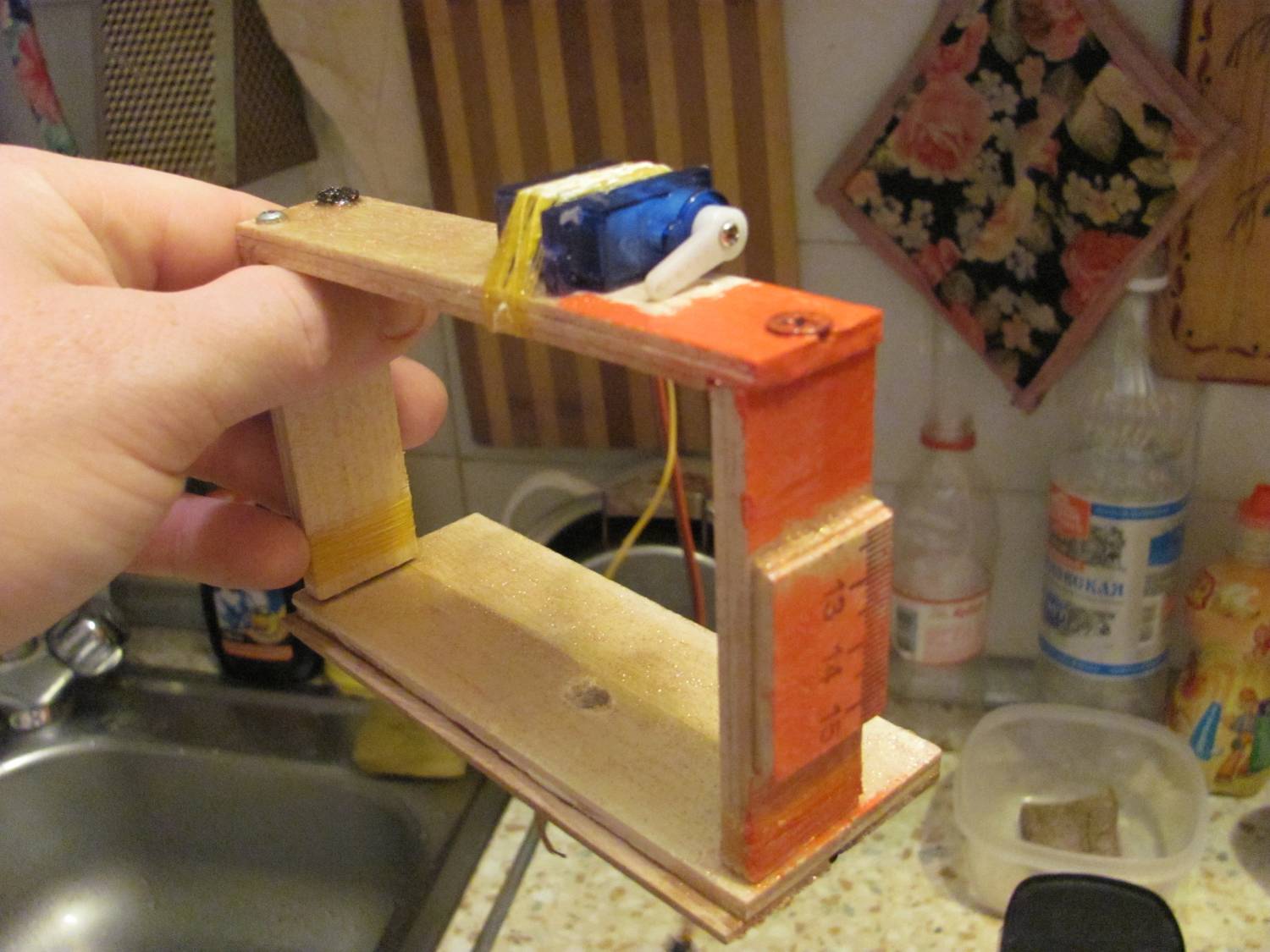
|  Добавлено (04.11.2013, 13:53)
---------------------------------------------
пилить качели мне ещё долго придётся...... Добавлено (04.11.2013, 18:17)
---------------------------------------------
Код void loop()
{
servo_gor.writeMicroseconds(2000);
delay(2000);
servo_gor.writeMicroseconds(2150);
delay(2000);
servo_gor.writeMicroseconds(2188);
delay(1500);
} Добавлено (04.11.2013, 18:18)
---------------------------------------------
УРА...... работает автомат спуска затвора, классно....... Добавлено (04.11.2013, 18:19)
---------------------------------------------
Блин красота да и только, вечером соберу остальную п - образную штуку, блин на поворот уже серву хочется.....
|
| |
| |
| Андрей01 | Дата: Понедельник, 04.11.2013, 18:29 | Сообщение # 13 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
|  Добавлено (04.11.2013, 18:29)
---------------------------------------------
Вот так он работал в режиме полного автомата (фотик), класс!!
|
| |
| |
| Андрей01 | Дата: Пятница, 08.11.2013, 12:32 | Сообщение # 14 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
| Сам объект съёмки
 Добавлено (04.11.2013, 22:51)
---------------------------------------------
Код #include <Servo.h>
Servo servo_gor;// создаём объект для контроля сервы
int val;//
void setup()
{
servo_gor.attach(9);// подключаем серву к пину 9
pinMode(10, INPUT); //объявляем 10 пин как вход
}
void loop()
{
val = digitalRead(10); // узнаём состояние кнопки
if(val) // тоже самое что (val == HIGN) // если 10 пин замкнут
{
servo_gor.writeMicroseconds(2000);
delay(2000);
servo_gor.writeMicroseconds(2150);
delay(2000);
} // делаем какуюто каманду
if(!val) // тоже что и val==LOW // если 10 пин не замкнут
{
servo_gor.writeMicroseconds(2188);
delay(1500);
servo_gor.writeMicroseconds(2000);
delay(2000);
} // делаем другую каманду
}
ЭТО ПРИМЕР ДАЛЬНЕЙШЕГО УСЛОЖНЕНИЯ
Вроде должно работать? кто подскажет?Добавлено (08.11.2013, 12:32)
---------------------------------------------
Ну наконец в черновом варианте доделал риг......
|
| |
| |
| Андрей01 | Дата: Суббота, 09.11.2013, 04:44 | Сообщение # 15 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
| 
|
| |
| |
| Андрей01 | Дата: Среда, 13.11.2013, 04:30 | Сообщение # 16 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
|  Ну вот и готов прототип, буду его пилить, доводить, красить и поднимать в высь..... Ну вот и готов прототип, буду его пилить, доводить, красить и поднимать в высь.....Добавлено (09.11.2013, 06:16)
---------------------------------------------
Фух, поправил код под риг, получил очень интересные данные по программе, вопщем всё поправил и он заработал, ура!!! Добавлено (09.11.2013, 20:16)
---------------------------------------------
Код #include <Servo.h>
Servo servo_s;// создаём объект для контроля сервы вертикального поворота
Servo servo_n;// создаём объект для контроля сервы горизонтального наклона
void setup()
{
servo_s.attach(9);// подключаем серву нажатия спуска у фотика к пину 9
servo_n.attach(10);// подключаем серву горизонтальную к пину 10
}
void loop()
{
servo_s.writeMicroseconds(2000);// отпускаем кнопку на фотике и ждём
delay(20000);
servo_s.writeMicroseconds(2178);// поднажимаем кнопку на фотике происходит фокусировка фотика и ждём
delay(5000);
servo_s.writeMicroseconds(2230);// нажимаем на кнопку снято на фотике идёт сьём на фотик или серия ждём
delay(2500);
servo_n.writeMicroseconds(1500);// фотик в горизонтальном положении и ждём
delay(10000);
servo_n.writeMicroseconds(2000);// поднимаем фотик к верху и ждём
delay(10000);
servo_n.writeMicroseconds(800);// опускаем фотик к низу и ждём
delay(10000);
servo_n.writeMicroseconds(1500);// фотик в горизонтальном положении
delay(10000);
} Добавлено (10.11.2013, 03:28)
---------------------------------------------
Вот видео работы рига и программы
http://www.youtube.com/watch?v=-bXGhuDSW3o&feature=youtu.be Добавлено (13.11.2013, 02:14)
---------------------------------------------
Вопщем испытывал свой код и остался в коде недоволен на 100%, сервы гудят при определённом угле установки, что не есть хорошо. Поискал и нашол вот такой вариант решения проблемы. Код ещё адаптировать мне придётся а так нормально.
Код #include <Servo.h>
Servo myservo;
void setup()
{
}
void loop()
{
myservo.attach(9);
myservo.write(0);
delay(500);
myservo.detach();
delay(10000);
myservo.attach(9);
myservo.write(90);
delay(500);
myservo.detach();
delay(10000);
} Добавлено (13.11.2013, 02:17)
---------------------------------------------
Вот для ознакомления, тишина и покой..... http://arduino.ru/forum....ashinki Добавлено (13.11.2013, 03:33)
---------------------------------------------
Код {
servo_s.attach(9);
delay(2000);
servo_s.writeMicroseconds(2000);// отпускаем кнопку на фотике и ждём
delay(2000);
servo_s.writeMicroseconds(2178);// поднажимаем кнопку на фотике происходит фокусировка фотика и ждём
delay(2000);
servo_s.detach();// отключаем шим серве и ждём
delay(2000);
servo_s.attach(9);
delay(5000);
servo_s.writeMicroseconds(2230);// нажимаем на кнопку снято на фотике идёт сьём на фотик или серия ждём
delay(2000);
servo_s.detach();// отключаем шим серве и ждём
delay(30000);
}  Добавлено (13.11.2013, 04:30)
---------------------------------------------
Код #include <Servo.h>
Servo servo_s;// создаём объект для контроля сервы вертикального поворота
Servo servo_n;// создаём объект для контроля сервы горизонтального наклона
void setup()
{
servo_s.attach(9);// подключаем серву нажатия спуска у фотика к пину 9
servo_n.attach(10) ;// создаём объект для контроля сервы горизонтального наклона
}
void loop()
{
servo_n.detach();// отключаем шим серве и ждём
servo_s.attach(9);
delay(2000);
servo_s.writeMicroseconds(2000);// отпускаем кнопку на фотике и ждём
delay(2000);
servo_s.writeMicroseconds(2178);// поднажимаем кнопку на фотике происходит фокусировка фотика и ждём
delay(2000);
servo_s.detach();// отключаем шим серве и ждём
delay(2000);
servo_s.attach(9);
delay(5000);
servo_s.writeMicroseconds(2230);// нажимаем на кнопку снято на фотике идёт сьём на фотик или серия ждём
delay(2000);
servo_s.detach();// отключаем шим серве и ждём
delay(3000);
servo_n.attach(10) ;// создаём объект для контроля сервы горизонтального наклона
servo_n.writeMicroseconds(860);// фотик в нижнее положении и ждём
delay(1500);
servo_n.detach();// отключаем шим серве и ждём
delay(10000);
servo_n.attach(10) ;// создаём объект для контроля сервы горизонтального наклона
delay(1000);
servo_n.writeMicroseconds(1000);// фотик в горизонтальном положении и ждём
delay(1500);
servo_n.detach();// отключаем шим серве и ждём
delay(10000);
servo_n.attach(10) ;// создаём объект для контроля сервы горизонтального наклона
servo_n.writeMicroseconds(1300);// фотик в... положении и ждём
delay(1500);
servo_n.detach();// отключаем шим серве и ждём
delay(10000);
servo_n.attach(10) ;// создаём объект для контроля сервы горизонтального наклона
delay(1000);
servo_n.writeMicroseconds(1500);// фотик в... положении и ждём
delay(1500);
servo_n.detach();// отключаем шим серве и ждём
delay(10000);
servo_n.attach(10) ;// создаём объект для контроля сервы горизонтального наклона
delay(1000);
servo_n.writeMicroseconds(1800);// фотик в... положении и ждём
delay(1500);
servo_n.detach();// отключаем шим серве и ждём
delay(10000);
servo_n.attach(10) ;// создаём объект для контроля сервы горизонтального наклона
delay(1000);
servo_n.writeMicroseconds(2000);// фотик в... положении и ждём
delay(1500);
servo_n.detach();// отключаем шим серве и ждём
delay(10000);
} |
| |
| |
| Андрей01 | Дата: Среда, 13.11.2013, 04:40 | Сообщение # 17 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
| 
|
| |
| |
| Андрей01 | Дата: Среда, 05.02.2014, 11:36 | Сообщение # 18 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
| Ну, что написать, пилить код под ночь ещё придётся долго, есть не состыковки с фотиком. А вот и панорама сделалась

Ну пока я доволен, допилю код и пойду дальше снимать.....
Тему можно закрывать, у меня всё.
Прошло почти 3 месяца застоя, сама плата пылилась в гараже под минус (зима однако). Принёс её и сам скелет, подпилил, под шаманил, нащёл код который залил в него, залил снова и решил немного посмотреть............... мать мая женщина..........это под каким угаром я его печатал...... столько пропусков по времени....... вопщем начал адаптировать код под риг (уже проситься наземный). Полностью отказался от фоток с верху. Надоело.
Доделал до более нормального состояния риг, залил прогу и приделал к триноге, видео работы этого робота прикладываю.
|
| |
| |
| Андрей01 | Дата: Среда, 05.02.2014, 14:17 | Сообщение # 19 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
| Вот выложил верхний ряд, вроде нормально, если погода не подведёт то попробую улицу поснимать.

|
| |
| |
| Konstrukt0r | Дата: Среда, 05.02.2014, 14:39 | Сообщение # 20 |

Группа: Банить не буду
Сообщений: 1327
Награды: 2
Статус: Offline
Город: Хабаровск
| Андрей, зачем такие сложности? Улицу можно и с рук поснимать, без автоматизации.
|
| |
| |
| Андрей01 | Дата: Пятница, 07.02.2014, 09:13 | Сообщение # 21 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
| http://yadi.sk/d/WeD-v87LHLjwX полная круговая Перевёрнутая панорама двора, я там в сторонке стою, -19 на улице, 5мин работы.
вот зачем, почти всё с шилось, косяков с параллаксом нет вопще.. доволен, но код пилить ещё надо.
Добавлено (05.02.2014, 18:26)
---------------------------------------------
Скажем так, пусть техника морозиться.
Добавлено (06.02.2014, 23:49)
---------------------------------------------
Поработала в -27, полёт нормальный, а вот батарейка на поворот сдохла (замёрзла) за 5-7 минут.
Сообщение отредактировал Андрей01 - Пятница, 07.02.2014, 09:18 |
| |
| |
| Андрей01 | Дата: Пятница, 07.02.2014, 10:35 | Сообщение # 22 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
| 
Добавлено (07.02.2014, 09:13)
УРРА!!! почти идеал, правда 93 фотки под 3мп. Это на полном автомате (риге) и проге по сбору панорам.
Сообщение отредактировал Андрей01 - Пятница, 07.02.2014, 10:36 |
| |
| |
| Андрей01 | Дата: Пятница, 07.02.2014, 10:40 | Сообщение # 23 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
|  Добавлено (07.02.2014, 10:37)
---------------------------------------------
Ура, полный автомат..... Добавлено (07.02.2014, 10:40)
---------------------------------------------
Спасибо Сергею и остальным, робототехника вещь иногда нужная.
|
| |
| |
| Bars | Дата: Четверг, 16.10.2014, 19:05 | Сообщение # 24 |
|
Группа: Пользователь
Сообщений: 13
Награды: 0
Статус: Offline
Город: Брянск
| Для наземного у него есть недостаток – он движется во время съемки. Я когда панорамы делаю, то либо задержку ставлю в несколько секунд после нажатия, либо пользуюсь радиопередатчиком, чтобы не было никакой тряски камеры. Это позволяет делать панорамы практически в любых условиях по освещению. А здесь, чтобы смазывания не было, надо только короткие выдержки использовать, что накладывает ряд ограничений. И если при съемке с воздуха с этим можно мириться (там движений и без вращения камеры много), то на земле – нет. Хотя устройство можно доработать – перемещать, останавливать, снимать, снова перемещать. Тогда да.
Сообщение отредактировал Bars - Четверг, 16.10.2014, 19:07 |
| |
| |
| Андрей01 | Дата: Суббота, 18.10.2014, 23:10 | Сообщение # 25 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
| Согласен полностью, переделал прогу давно под это и забросил в гараж, так и лежит уже пол года (умертвил батарейку литиевую), жду прихода шабашек по работе и на эти деньги куплю батарейку аж на 3 ампера. Добавлено (18.10.2014, 23:10)
---------------------------------------------
А так погряз в домашних делах по самую голову, даже змея гулять неохота выпустить.....
|
| |
| |
| Ветров | Дата: Пятница, 07.11.2014, 21:18 | Сообщение # 26 |

Группа: Пользователь
Сообщений: 383
Награды: 0
Статус: Offline
Город: Воронеж
| Нашёл французский форум , может кто для себя тут по коду что новое найдёт. Для меня пока дебри это всё . Я почему -то думал что всё просто , подключаю ик диод к ардуине ,потом подключаю библиотеку интервалометра как в чдк , и просто пишу "щёлкать с интервалом 7секунд " ,не знаю как там эта команда звучит ,но по сути ик просто будет щёлкать затвором. Наверно для олимпуса (возьмём мой фотик) есть какаяя-то библиотека ,в колторой импульсы ик прописаны для каждой модели кэнона ,никона и тд и просто вставляются в тело программы . Никакие компиляторы и остальную ахинею мне не надо , мне надо чтобы всё было прост окак в chdk ,т.е. есть функция и значения.
То ест ьпо идее всё просто ,но у меня нет ардуины под рукой чтоб проверить.
https://translate.googleusercontent.com/transla....&u=http
А это самый идиотский сайт какой только бывает, какие-то камремоуты и остальное дерьмо столетнее какое-то ,у меня от этого сайта даже голова болит. Не понятно что чего делает.
Если бы ступенчато разобрать.
http://www.kapshop.com/Rig-Par....ex.html
джентл лед авто нам не нужен ,это прост овнешний интервалометр ,у нас вместо него ардуина будет http://www.kapshop.com/Rig-Parts-Camera-Control/c6_83/index.html
это тоже не понятно зачем , а если взять их готовые комплекты ригов ,так там я вообще не понял ,мне в прошлый раз Игорь ответил ,чтоу они не поворотоные, как они не поворотные, если там везде платы от серв и удалённый спуск. То что идиот писал сайт ,это видно сразу . Всё настолько запутано, напоминает мне одного чёрта в радиодеталях магазине ,если туда прийти и спросить что-то он тупо уставится и вместо ответа будет на меня смотреть .
http://www.kapshop.com/Rig-Par....fo.html
Сообщение отредактировал Ветров - Пятница, 07.11.2014, 21:20 |
| |
| |
| Андрей01 | Дата: Пятница, 07.11.2014, 21:42 | Сообщение # 27 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
| Цитата Ветров ( ) Я почему -то думал что всё просто , подключаю ик диод к ардуине ,потом подключаю библиотеку интервалометра как в чдк , и просто пишу "щёлкать с интервалом 7секунд " ,не знаю как там эта команда звучит ,но по сути ик просто будет щёлкать затвором. |
| |
| |
| Ветров | Дата: Пятница, 07.11.2014, 22:01 | Сообщение # 28 |
|
Группа: Пользователь
Сообщений: 383
Награды: 0
Статус: Offline
Город: Воронеж
| Я имел в виду не дебильный автолед коробочку с дебильного сайта с космическими ценами-капшоп ,а имел в виду что просто ик диод на проводках подключить к плате ардуино и в командной строке вставить кода как в чдк ,т.е. уже готовый ,как там звучит эта команда не знаю ,ну типа пишу "щёлкнут ьдиодом с интервалом 7сек , 250раз" и подключить импульс от олимпуса, там наверн овсё это есть в ардуине в командах. Помню у меня ик приёмник с компортом был для связи со старыми телефонами ,так там ещё прогрмка была, щёлкаешь пультом и сразу выводилась частота и длительность импульса ,Сергей про это вроде спрашивал.
Ик диод как к ардуино подключатеся ,нгапрямую к выводу на плате или шилд (дополнительная плата) ?
Надо в общих чертах разобртаься, прежде чем к частностям перейти , к расчёту стоимости и тд ,пока я на этом этапе.
--------
Некорректно тут выразился ,сам себя поправлю , тут вот прочитал про все эти коды http://nauchebe.net/2012....arduino
Нашлась база ик кодов ,сразу нашёл мой пульт от олимпуса rm 1 , http://lirc.sourceforge.net/remotes-table.html
http://lirc.sourceforge.net/remotes/olympus/RM-1
Сообщение отредактировал Ветров - Пятница, 07.11.2014, 23:22 |
| |
| |
| Андрей01 | Дата: Суббота, 08.11.2014, 02:47 | Сообщение # 29 |
|
Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
| Я про улучшение, Сергей хотел такое сделать, приставка к его ригу наземному, там можно было выбирать нужный код или забивать нужный параметр в коде - время менять. Добавлено (08.11.2014, 02:47)
---------------------------------------------
Цитата Ветров ( ) Ик диод как к ардуино подключатеся ,нгапрямую к выводу на плате или шилд (дополнительная плата) ? |
| |
| |
| Sergey | Дата: Суббота, 08.11.2014, 21:47 | Сообщение # 30 |
|
Admin
Группа: Банить не буду
Сообщений: 2681
Награды: 7
Статус: Offline
Город: Владивосток
| Цитата Ветров ( ) перечислите сайты |
| |
| |