|
Поворотные механизмы для фото-видеокамер
|
|
| yurik_ryba | Дата: Четверг, 06.12.2012, 03:01 | Сообщение # 91 |

Группа: Старичок
Сообщений: 692
Награды: 0
Статус: Offline
Город: Calgary, Canada
| Действительно, можно же простой вопрос и через автоматический переводчик перевести. Мне вот пишут французские каперы например, гуглоперевод на английский и скажу вам понятно около 80%. Когда что-то непонятно, пишу им, мол перефразируйте, не понял вас.
Quote (dp) Вообще странно - ведь родной пульт соневский не позволяет переключаться из фото в видео.... может всеже имеется ввиду пуск/пауза в видео режиме? Тот же гугль транслейт говорит "... регулирует высвобождение затвора камеры и начала / остановки записи видео" - я не вижу где говорится про переключение между фото/видео
Дима, в нексе нет отдельного видеорежима. Есть лишь кнопка старта/окончания видеозаписи, с красной пипочкой такая справа-сверху от дисплея.

Что gentLED, что Stratosnapper её за вас нажимает, в любом режиме камеры.Добавлено (06.12.2012, 02:43)
---------------------------------------------
Quote (Sergey) дело не в выгодности предложения, дело в понимании происходящего процесса: появляется возможность изобрести что-то своё, а не зависеть от умных дядей.
Я вот еще подумал, ведь можно наверное эту команду как-то записать с работающего LED?Добавлено (06.12.2012, 03:01)
---------------------------------------------
Гыы, ларчик открывался просто 
Сергей, на страничке Multi-camera-IR-control, где вы писали Себастиану отзыв, и есть готовое решение для ардуины.

Сообщение отредактировал yurik_ryba - Четверг, 06.12.2012, 02:03 |
| |
| |
| dp | Дата: Четверг, 06.12.2012, 03:14 | Сообщение # 92 |

Группа: Старичок
Сообщений: 533
Награды: 0
Статус: Offline
Город: Белгород
| Ого! завтра проверю на семерке, спасибо Юра!
Сообщения свежие, ноябрьские
блин, каналов на приемнике так не напасешься 
|
| |
| |
| yurik_ryba | Дата: Четверг, 06.12.2012, 05:51 | Сообщение # 93 |
|
Группа: Старичок
Сообщений: 692
Награды: 0
Статус: Offline
Город: Calgary, Canada
| Да не за что 
По-хорошему завидую вам - ардуинщикам, у меня на эту тему времени к сожалению нет.
|
| |
| |
| Sergey | Дата: Пятница, 07.12.2012, 00:00 | Сообщение # 94 |
 Admin
Группа: Банить не буду
Сообщений: 2681
Награды: 7
Статус: Offline
Город: Владивосток
|
Во как проекция то работает, только о Себастьяне подумал, а у него уже на сайте готовый код имеется Блин может есть тогда код и на HDR где нибудь?
Quote (yurik_ryba) Я вот еще подумал, ведь можно наверное эту команду как-то записать с работающего LED? |
| |
| |
| Konstrukt0r | Дата: Воскресенье, 20.01.2013, 23:21 | Сообщение # 95 |

Группа: Банить не буду
Сообщений: 1327
Награды: 2
Статус: Offline
Город: Хабаровск
| Соорудил, наконец, новый подвес на маятнике.
Микросервы на наклон и поворот.
Поворот - на шестерёнках 1:2,5, так что даже больше 360 градусов выходит.
Не могу разобраться, как в маэстре сделать плавный поворот. Сервы поворачиваются между фреймами со всей дури, из-за чего получаются рывки.
Поля скорости и ускорения есть, но там что ни подставляй - не чувствую разницы. Как замедлить?
Разбивать поворот на тыщу фреймов не вариант - всё равно дёрганье, плюс памяти не хватит в контроллере.
Кстати, сколько он может команд запомнить?
|
| |
| |
| Sergey | Дата: Понедельник, 21.01.2013, 13:29 | Сообщение # 96 |
|
Admin
Группа: Банить не буду
Сообщений: 2681
Награды: 7
Статус: Offline
Город: Владивосток
| Миша, понимаю что поздно, но не смог удержать негодование: зачем вы берёте Маэстро, а не Ардуину? Маэстро всё таки узко направлен, для нужд управления из вне сервами, а Ардуино это уже полноценный самостоятельный контроллер, с более гибким языком программирования. Да, немного сложным, но могущим решить такие вопросы что и представить себе неможно на Маэстро. Дима, не даст соврать 
К сожалению по вашему вопросу помочь не смогу как это в Моэстро сделать, а в Ардуине это просто делаеться формулой счётчика
Код for(a=x;a<=y;a++) //а - значение для поворота сервы
Вот например функция которая работает у меня на риге:
Код if(posAngle-val_Angle > 0)
{
servo_vert.attach(servo_vert_pin);
if(posAngle-val_Angle >= 3 && p!=2000)
{
for(p=1499; p<2000; p++)
{
servo_vert.writeMicroseconds(p);
delay(2);
}
}
if(posAngle-val_Angle >= 1 && posAngle-val_Angle < 3)
{
servo_vert.writeMicroseconds(1550);
}
if(posAngle-val_Angle < 1)
{
servo_vert.writeMicroseconds(1515);
}
delay(30);
}
Условие: если угол наклона не соответствует заданному параметру, то серва разгоняется ведя каретку к заданному положению. При подходе сбрасывает скорость и с замедленным движением становится на заданный угол.
Для платформы в круговом движении от остановок для съёмки, я пока отказался, попробую как будет вестись съёмка, если платформа будет медленно двигаться, со скорость 40 с/об. Но для штативной съёмки оставил, так как приходиться снимать иногда на длинных выдержках, а функция выглядит вот так:
Код void ServoGor(boolean g) // функция поворота сервы затвора
{
int p;
int speed_servo;
if(focal_distance_16)
{
speed_servo=1600;
}
if(focal_distance_30)
{
speed_servo=1560;
}
if(g==HIGH)
{
servo_gor_go = HIGH;
servo_gor.attach(servo_gor_pin); // подключаем серву горизонтальную
for(p=1499; p<=speed_servo; p++)
{
servo_gor.writeMicroseconds(p);
delay(2);
}
}
if(g==LOW)
{
servo_gor_go = LOW;
for(p=speed_servo; p>=1499; p--)
{
servo_gor.writeMicroseconds(p);
delay(2);
}
servo_gor.detach(); //отключаем серву горизонтальную
}
}
И если даже чего-то не понятно как написать код, то в сети очень много Ардуиновских сайтов, на которых водятся "Маньяки" ребята достаточно хорошо знают язык и с удовольствием помогают.
|
| |
| |
| yurik_ryba | Дата: Понедельник, 21.01.2013, 14:54 | Сообщение # 97 |
|
Группа: Старичок
Сообщений: 692
Награды: 0
Статус: Offline
Город: Calgary, Canada
| Цитата (Konstrukt0r) Соорудил, наконец, новый подвес на маятнике.
Микросервы на наклон и поворот.
Поворот - на шестерёнках 1:2,5, так что даже больше 360 градусов выходит.
Не могу разобраться, как в маэстре сделать плавный поворот. Сервы поворачиваются между фреймами со всей дури, из-за чего получаются рывки.
Поля скорости и ускорения есть, но там что ни подставляй - не чувствую разницы. Как замедлить?
Разбивать поворот на тыщу фреймов не вариант - всё равно дёрганье, плюс памяти не хватит в контроллере.
Кстати, сколько он может команд запомнить?
Михаил, на вкладке Channel settings для ваших серв выставите следующий параметр:

На канале 2 у меня серва наклона (Tilt Servo).
Не забудьте нажать Apply Settings, а то ничего не сохранится.
Сообщение отредактировал yurik_ryba - Понедельник, 21.01.2013, 15:13 |
| |
| |
| dp | Дата: Понедельник, 21.01.2013, 17:23 | Сообщение # 98 |
|
Группа: Старичок
Сообщений: 533
Награды: 0
Статус: Offline
Город: Белгород
| Ну наконецто и Михаил переходит на микроконтроллеры
Получилось скорость поменять?
Интересно посмотреть фото\видео работы подвески.
Соглашусь с Сергеем в плане универсальности ардуины, вещ отличная и всегда в хозяйстве пригодится) На какие-то специфичные вещи маэстро не способен, зато его плюс для начинающих это простота настройки скрипта. Хотя тоже свои нюансы - если охота выжать из него все на что он способен, то придется пилит код руками.
|
| |
| |
| Sergey | Дата: Понедельник, 21.01.2013, 18:05 | Сообщение # 99 |
|
Admin
Группа: Банить не буду
Сообщений: 2681
Награды: 7
Статус: Offline
Город: Владивосток
| У Ардуины тоже кстати есть программы для визуального и предварительного программирования...
|
| |
| |
| Konstrukt0r | Дата: Понедельник, 21.01.2013, 23:11 | Сообщение # 100 |
|
Группа: Банить не буду
Сообщений: 1327
Награды: 2
Статус: Offline
Город: Хабаровск
| Спасибо, Юрий, сработало. А я думал - что чем больше значение, тем ниже скорость, если при 0 - максимально возможная. С ускорением не разобрался до конца. Скорость нормальная в диапазоне 10..50. Правда, всё равно плавности, как от моторчика, не добиться. Как отлажу - конечно, покажу и фото и видео. Пока провода все надо спрятать, прикрепить батарею и контроллер, сделать утепление.
Решил по зиме летать с четырьмя мизинчиковыми батарейками, 44 г весит связка. Батарейку в камере не трогаю.
Добавлено (21.01.2013, 23:11)
---------------------------------------------
Вот, что примерно получилось:
Камеру планирую ставить также в режим серийной съёмки. Canon S100 делает два кадра в секунду, если снимать в jpg.
Сервы пока дёргаются, пока не подобрал оптимальный режим. Возможно, поставлю плавное непрерывное вращение.
Вот видео моего "франкенштейна":
Решил отказаться от крестовины-пикавета и сделал маятник. Для гашения колебаний приспособил аммортизатор из шприца.
Каркас практически весь - из углепластиковой трубки диаметром 4 мм, внутренний диаметр 2 мм, толстостенка.
Соединения все - циакрин и обмотка капроновыми нитками на циакрине.
Большинство "железок" - алюминиевая жесть толщиной 0,5 мм, сложенная где вдвое, а где и втрое.
Батарейки утеплены потолочкой, поэтому места много занимают. Провода, батарея, контроллер - приделаны на живую нитку, это пока рабочий вариант для обкатки "концепции".
Весит весь этот ужас 345 грамм. Резерв для облегчения - только батарея, 44 г.
Плюс надо учесть, что фотоаппарат этот тяжелее, чем IXUS 130.

Ещё несколько фотографий - в моём ЖЖ
|
| |
| |
| dp | Дата: Вторник, 22.01.2013, 00:43 | Сообщение # 101 |
|
Группа: Старичок
Сообщений: 533
Награды: 0
Статус: Offline
Город: Белгород
| Ну что сказать, браво! У вас талант умещать все в нереально малый вес)) у меня всегда все начинает обрастать разными конструкциями - здесь минимализм в своем истинном понимании)))
Сюда бы еще маленькую липошку вместо батареек и вообще огонь.
А так я бы сервы заменил всеже на MG90 - у них металлические шестерни а разница в весе пара грамм, зато надежней.
Маятник крут!
Сообщение отредактировал dp - Вторник, 22.01.2013, 00:44 |
| |
| |
| Андрей01 | Дата: Вторник, 22.01.2013, 02:35 | Сообщение # 102 |

Группа: Банить не буду
Сообщений: 2342
Награды: 3
Статус: Offline
Город: Пермь
| Браво, только мне кажется, что не так надо испытывать затухания в маятнике, он должен быть на верёвке, тогда совсем другие будут виды колебаний и амплитуд Добавлено (22.01.2013, 02:35)
---------------------------------------------
Миша а что вы так за вес боретесь, у меня в планах под 1 кг вешать.
|
| |
| |
| Sergey | Дата: Вторник, 22.01.2013, 02:52 | Сообщение # 103 |
|
Admin
Группа: Банить не буду
Сообщений: 2681
Награды: 7
Статус: Offline
Город: Владивосток
| Миша, чтоб меньше дёргалось поменяйте шестерни местами, чтоб скорость на понижение была а не на повышение. И сделайте серву на круговое движение, тогда можно задавать ей скорость.
|
| |
| |
| DragonFly | Дата: Вторник, 22.01.2013, 03:14 | Сообщение # 104 |

Группа: Старичок
Сообщений: 549
Награды: 0
Статус: Offline
Город: Николаев, Украина
| Цитата (Sergey) Миша, чтоб меньше дёргалось поменяйте шестерни местами, чтоб скорость на понижение была а не на повышение. И сделайте серву на круговое движение, тогда можно задавать ей скорость. |
| |
| |
| yurik_ryba | Дата: Вторник, 22.01.2013, 04:30 | Сообщение # 105 |
|
Группа: Старичок
Сообщений: 692
Награды: 0
Статус: Offline
Город: Calgary, Canada
| Супер Точно минимализм.
Как вы закрепили серву вращения, она не уплывет? Контроллер для зимних полетов утеплять однозначно нужно, он первым замерзает. Я делал для него небольшой матерчатый чехольчик (вот тут на видео оранжевый) и снимал до -25 (без учета ветра). Там уже оператор замерзал
Мне кажется, нужно делать постоянное вращение и отказываться от остановок, ничего кроме дерганий они не дают. А тем более при двух кадрах в секунду можно так закрутить, ухх! Гарантированная панорама при любой болтанке - сшивка за один клик.
Поиграйте с параметром Acceleration, плавность будет.
|
| |
| |
| Polaris79 | Дата: Вторник, 22.01.2013, 06:30 | Сообщение # 106 |
|
Группа: Старичок
Сообщений: 418
Награды: 0
Статус: Offline
Город: Noname
| Цитата (yurik_ryba) Мне кажется, нужно делать постоянное вращение и отказываться от остановок, ничего кроме дерганий они не дают.
ну это смотря как вращать и как останавляваться ... если серва переделанна под постоянное вращение, что я настоятельно советую сделать Мише, то длительность импульса ШИМ(PWM) управляет скоростью вращения сервы и можно сделать плавное вращение с затуханием к моменту спуска затвора ... допустим моя дешовенькая мыльница не в состоянии снимать на ходу у нее даже при небольших флуктуациях подвеса смаз по краям кадра ... тоже относиться и к наклонной серве - имея в распоряжении два таймера, один из которых просто щетчик интервала (допустим 1мс) а второй упраляет ШИМ, можно сделать плавный ход сервы наращивая ШИМ тоесть в нашем случае уже угол постепенно пока не достигнем заданного значения ... на счет плавности то серва всеравно не будет иди на 100 процентов плавно т.к. в качестве энкодера у нас переменный резистор а он собака отнюдь не однопроцентный ...
в принципе весь код с сервами, сценариями и с ИК(или радио) упарвлением подвески у меня получился до 3х килобайт бинарник - писал на С ... главное продумать автомат правильно и переходы между состояниями ... я стремился к тому чтобы изменения всех параметров сценария фотографирования проходили в удобоваримом массиве или посредством скрипта скармливаемого с компа ... чтото типа такого
//scenario sequence - first index is a current state, second is a mode number
//0xFFF0 value sets end of the sequence
//last line of the scenario array assigns flags
#define END_SEQ 0xFFF0
#define MODE_NUM 4 //number of supported scanning modes for the KAP RIG
//flag definitions
#define FLAG_LINE 0x07 //last line number
//bit 0
#define SCAN_MODE 0x01 //scanning mode 1-vertical scanning, 0-horizontal scanning
//bit 1
#define CAM_POS 0x02 //camera position 0-vertical position, 1-horizontal position
#define VER_SCAN_MODE 0x01
#define HOR_CAM_POS 0x02
const unsigned int scenario_tbl[FLAG_LINE + 1][MODE_NUM] = {{ _0_GRAD, _0_GRAD, _70_GRAD, _90_GRAD},
{ _30_GRAD, _36_GRAD, _90_GRAD, _70_GRAD},
{ _45_GRAD, _70_GRAD, _100_GRAD, _36_GRAD},
{ _70_GRAD, _90_GRAD, _45_GRAD, _0_GRAD},
{ _90_GRAD, END_SEQ, _30_GRAD, END_SEQ},
{_100_GRAD, _0_GRAD, _0_GRAD, _0_GRAD},
{ END_SEQ, _0_GRAD, END_SEQ, _0_GRAD},
{ 0x03, 0x01, 0x02, 0x00}};
Сообщение отредактировал Polaris79 - Вторник, 22.01.2013, 06:34 |
| |
| |
| Sergey | Дата: Вторник, 22.01.2013, 21:44 | Сообщение # 107 |
|
Admin
Группа: Банить не буду
Сообщений: 2681
Награды: 7
Статус: Offline
Город: Владивосток
| Цитата (DragonFly) Если я правильно рассмотрел серву, то она просто так не переделывается на круговую, у меня китайская серва, так в ней силовая шестерня та которая на выход сделана только сектором в 180 градусов.
Вполне возможно, производители разные... но на моих двух от разных производителей, все шестерни полные круговые. Достаточно обрезать на главной шестерне усики и убрать полностью переменный резистор, разумеется выпаяв его. Взамен впаивать нечего не надо.
Но а для себя я отказался от серв на движение, взамен ставлю двигатели с редукторами
|
| |
| |
| Sergey | Дата: Вторник, 22.01.2013, 21:54 | Сообщение # 108 |
|
Admin
Группа: Банить не буду
Сообщений: 2681
Награды: 7
Статус: Offline
Город: Владивосток
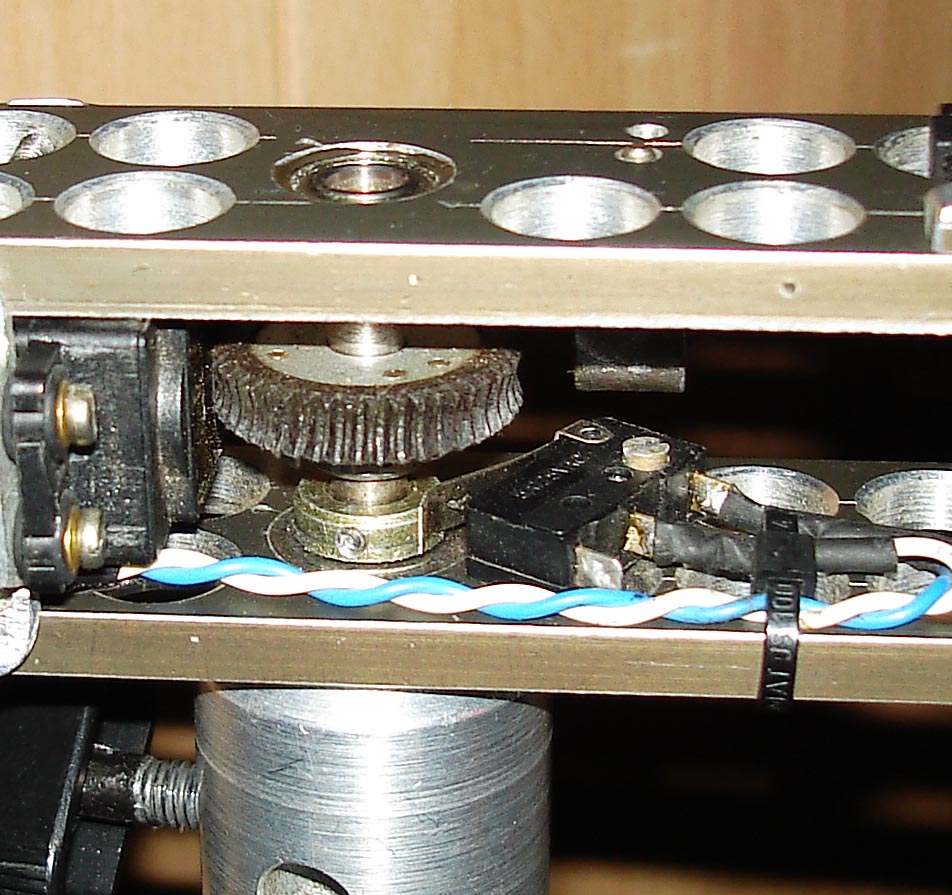
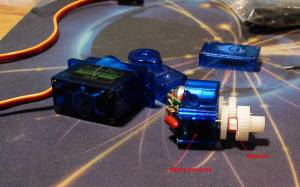
| 
По размерам меньше чем синяя серва а по мощности такой же как и серва с лева.
|
| |
| |
| Konstrukt0r | Дата: Вторник, 22.01.2013, 22:58 | Сообщение # 109 |
|
Группа: Банить не буду
Сообщений: 1327
Награды: 2
Статус: Offline
Город: Хабаровск
| Сергей, а как моторчик определяет, сколько он прокрутился? В нём ведь резистора нет. Или концевые выключатели какие-то на подвеске стоят? По времени работы ведь и ошибиться можно, при тряске может моторчик на наклон, к примеру, провернуться больше или меньше нормы. Моторчики мне эти с редукторами очень нравятся. Серву на поворот поставил исключительно в экспериментальных целях. И с прицелом полетать ночью, когда нужно фиксировать камеру надолго под нужным углом.
Чувствую, скоро я вас закидаю вопросами про переделку сервы на непрерывное вращение. У меня есть одна сгоревшая, и одна дёрганная - при подключении что-то себе шелестит, никак не замолкает в нужном положении. На всех шестерёнка верхняя круговая.
|
| |
| |
| dp | Дата: Вторник, 22.01.2013, 23:29 | Сообщение # 110 |
|
Группа: Старичок
Сообщений: 533
Награды: 0
Статус: Offline
Город: Белгород
| Цитата (Sergey) По размерам меньше чем синяя серва а по мощности такой же как и серва с лева.
Зато медленные! Сервы и выруливают все равно из-за того что они быстрые.
|
| |
| |
| Sergey | Дата: Вторник, 22.01.2013, 23:52 | Сообщение # 111 |
|
Admin
Группа: Банить не буду
Сообщений: 2681
Награды: 7
Статус: Offline
Город: Владивосток
| Цитата (Konstrukt0r) как моторчик определяет, сколько он прокрутился?


Цитата (Konstrukt0r) при тряске может моторчик на наклон, к примеру, провернуться больше или меньше нормы
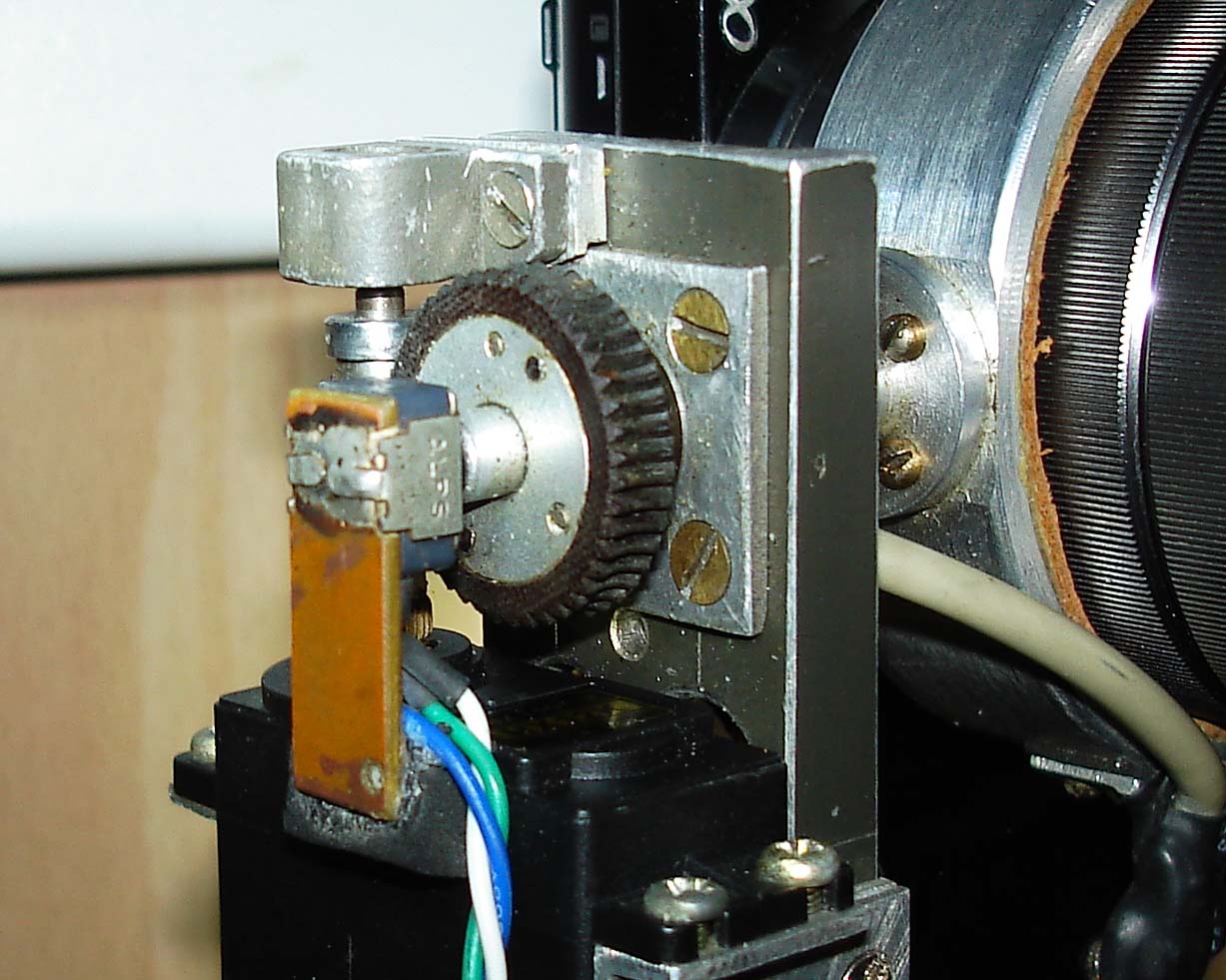
Для вертикального поворота каретки конечно уже лучше серва подходит, но она должна быть включена постоянно, чтоб не проворачивалась от веса камеры. А ели серву ставить через понижения шестернями то опять в ней отподает рентабельность, лучше ставить двигатель с редуктором, а угол мерить резистором переменным по оси.
|
| |
| |
| Sergey | Дата: Среда, 23.01.2013, 00:12 | Сообщение # 112 |
|
Admin
Группа: Банить не буду
Сообщений: 2681
Награды: 7
Статус: Offline
Город: Владивосток
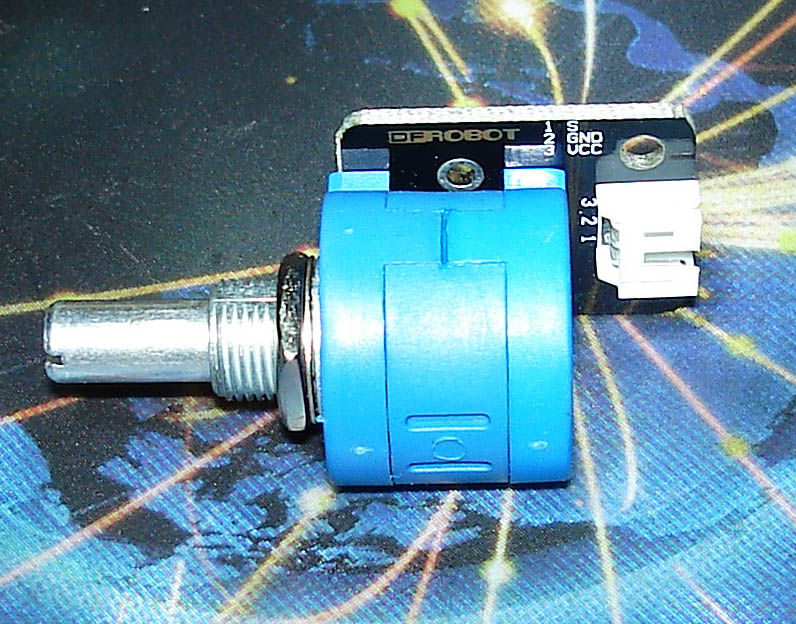
| Купил вот такой вот десяти поворотный резистор:

Ждал с нетерпением когда придёт, но когда пришёл понял что он совсем не обязателен для наших целей, хватит и простого одно оборотного потенциометра небольшого...
|
| |
| |
| Konstrukt0r | Дата: Среда, 23.01.2013, 23:08 | Сообщение # 113 |
|
Группа: Банить не буду
Сообщений: 1327
Награды: 2
Статус: Offline
Город: Хабаровск
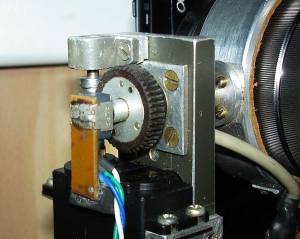
| Сергей, получается, у тебя на наклон стоит модифицированная серва с червяком, а угол поворота определяется потенциометром? Потенциометр подключен к плате сервы, или ещё как-то контроллер узнаёт об угле поворота?
Как реализовано управление моторчиком, чтобы он включался на чётко определённые промежутки времени - от контроллера?
|
| |
| |
| Polaris79 | Дата: Четверг, 24.01.2013, 03:57 | Сообщение # 114 |
|
Группа: Старичок
Сообщений: 418
Награды: 0
Статус: Offline
Город: Noname
| Цитата (Sergey) лучше ставить двигатель с редуктором, а угол мерить резистором переменным по оси. Добавлено (24.01.2013, 03:46)
---------------------------------------------
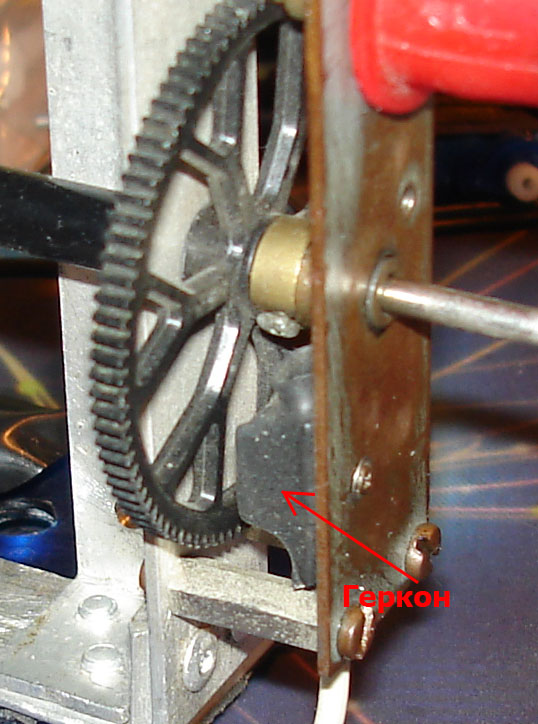
Сергей, круто конечно у вас получилось ... геркон не хотите на цифровой датчик Холла поменять ? он полегче и поточнее будет - проверенно ... главное только брать цифровой датчик где операционник уже встроен - размером с транзюк и по виду тоже - три ноги ... одна из которых выдает цифровой уровень Добавлено (24.01.2013, 03:57)
---------------------------------------------
Цитата (Sergey) Вполне возможно, производители разные... но на моих двух от разных производителей, все шестерни полные круговые. Достаточно обрезать на главной шестерне усики и убрать полностью переменный резистор, разумеется выпаяв его. Взамен впаивать нечего не надо.
Сообщение отредактировал Polaris79 - Четверг, 24.01.2013, 03:40 |
| |
| |
| DragonFly | Дата: Четверг, 24.01.2013, 07:26 | Сообщение # 115 |
|
Группа: Старичок
Сообщений: 549
Награды: 0
Статус: Offline
Город: Николаев, Украина
| Хотел написать в сообщении выше но в тот момент не успел, в соседней ветке это все уже описано Дмитрий этот способ реализовал, я кстати тоже, только вместо потенциометра использовал два резистора по 2.2 кОм
http://kitevlad.ru/forum/14-43-8806-16-1355832661
|
| |
| |
| Sergey | Дата: Четверг, 24.01.2013, 23:38 | Сообщение # 116 |
|
Admin
Группа: Банить не буду
Сообщений: 2681
Награды: 7
Статус: Offline
Город: Владивосток
| Цитата (Konstrukt0r) Сергей, получается, у тебя на наклон стоит модифицированная серва с червяком, а угол поворота определяется потенциометром? Потенциометр подключен к плате сервы, или ещё как-то контроллер узнаёт об угле поворота?
Да, совершенно верно, серва постоянного вращения. Потенциометр даёт сигнал не серве (пробовал и такой вариант) а Ардуине. Получается обратная связь, контролер не хранит в памяти угол сервы, а именно выясняет какой именно угол в данный момент, как и на дорогих цифровых сервах с обратной связью.
Моторчик стоит на старом риге, и подключен через драйвер, чтоб не спалить Ардуину. Можно просто через транзистор, если не предполагается обратный ход. Но на новом риге обязательно буду ставить драйвер. К нему можно подсоединить сразу два мотора. Хотя если есть от поломанной сервы драйвер-платка, то как вариант его тоже можно использовать как это сделал Дима, есть определённые свои преимущества, не нужно заниматься излишними пайками. Но потенциометр всё равно подсоединить лучше к Ардуине.
Цитата (Konstrukt0r) Как реализовано управление моторчиком, чтобы он включался на чётко определённые промежутки времени - от контроллера?
Цитата (Polaris79) Хмммм ... ну вот вы и вернулись обратно к серве
Цитата (Polaris79) оно конечно не пойдет для видео или аудио
Цитата (Polaris79) но поверьте один качественно расчитанный в матлабе и написанный ПИД регулятор добавит вам много больше седых волос
Цитата (Polaris79) геркон не хотите на цифровой датчик Холла поменять ?
Цитата (Polaris79) не совсем согласен ... впаять какразтаки желательно два параллельно соединенных резистора примерно по 2.5КОм вполне сойдет ... таким образом вы задаете среднюю точку и от нее можете потом управлять скоростью вращения в ту или иную сторону ... если ничего не впаивать то получиться уже не серва а просто двигатель с редуктором крутящийся всегда с одинаковой скоростью (немедленно причем) ... если вы выпаяли переменный резистор то на контроллер управления двигателем что будет поступать ??? ....
Игорь, я уже где то здесь на форуме писал: резисторы не нужны. Ни чего невпаяное так же имеет сопротивление только бесконечное, и средняя точка ни как не нарушится. Программно точка на разных сервах варьирует между 1499 и 1500. Чтоб двигатель начал крутиться нужно подать от 1501-2200 в одну сторону или 1499 - 700 в другую. Чем полярней значение тем больше подаётся напряжение и быстрей крутится двигатель. Также на полярные значения (2200 и 700) на разных сервах разные, но это легко определяется при настройках. Можете проверить ради интереса. Единственно хочу предупредить не подавать на серву излишнее напряжение, чтоб не сгорел двигатель, если это трудно сделать физически, не хочется например добавлять понижатель напряжения, то можно программно, не подовая шим со значениями близкими к полярным, например 1000 в одну сторону или 2000 в другую.
- смайлик не правильный, я просто улыбнулся но не прыгаю от счастья.
|
| |
| |
| dp | Дата: Пятница, 25.01.2013, 21:25 | Сообщение # 117 |
|
Группа: Старичок
Сообщений: 533
Награды: 0
Статус: Offline
Город: Белгород
| о, и здесь про сервы, везде про сервы  Добавлено (25.01.2013, 21:25)
---------------------------------------------
ахахаха, жосткие смайлы, Сергей верните пжлст усе обратно!
|
| |
| |
| Konstrukt0r | Дата: Пятница, 01.02.2013, 21:56 | Сообщение # 118 |
|
Группа: Банить не буду
Сообщений: 1327
Награды: 2
Статус: Offline
Город: Хабаровск
| Что-то глючит мой контроллер. На неделе пробовал - серва наклона вместо того, чтобы держать камеру ровно, чуть наклоняет её, серва поворота отрабатывает все фреймы, потом идёт наклон вниз, и тут - глюк, диод на контроллере мигает ярким красным цветом, серва на поворот со всей дури, быстро возвращает подвеску на исходную.
Сегодня решил перезалить скрипт - но решил сначала попробовать - всё работает, как задумывалось.
Вынес на балкон, поморозил всё это хозяйство 10 минут - начались те же глюки. Причем теперь поворот проходит не все позиции, красный диод загорается чаще.
Думаю, как с этим делом бороться...
Что красный диод означает, и почему может глючить тёплый контроллер?
И ещё вопрос по поводу поведения контроллера на морозе. Юрий утепляет контроллер, но я думаю, это утепление спасает только на первое время, до включения. Потом если минут 20 летать, он точно охладится, никакое утепление не поможет, источника тепла-то нет. Может, достаточно держать подвеску в тепле и запускать контроллер на земле, пока тёплый?
|
| |
| |
| Polaris79 | Дата: Суббота, 02.02.2013, 00:08 | Сообщение # 119 |
|
Группа: Старичок
Сообщений: 418
Награды: 0
Статус: Offline
Город: Noname
| Цитата (Konstrukt0r) И ещё вопрос по поводу поведения контроллера на морозе.
какая у вас плата ... маэстровский контроллер или ардуина? ... на сколько помню вы упоминали маэстру пололулу на которой стоит вроде PIC18F14K50 RISC контроллер и кстати Industrial -I/SS (I -temperature range, SS-package type)... генератор там кварцевый типа все в одном корпусе ... corner case правда может быть там в питании так что советую вам мультиметром проконтролировать потребление или даже попытайтесь на морозе запитать его большими вольтами (вроде там питание от 5 до 16 вольтов на стабилизатор подавать можно) ... дело в том что в PIC встроенн Brown Detector который при проседании питания ниже какогото предела сбрасывает контроллер и прога начинает выполняться сначала (обычно эта опция включаеться при программировании в конфигурации)
1) проверьте потребдление тока и напряжение в теплой комнате когда ничего не глючит и все нормально
2) вынесите все на балкон или засуньте в холодильник(как кому нравиться) и проверяйте потребление тока и напругу пока плата охлаждаеться ... уверен что на какомто этапе питание просядет причем вся система должна быть в сборе и серва должна быть нагруженна фотиком тогда эксперимент будет чистым
может быть грубо сказанно но ... Вы начнете понимать на 100 процентов что происходит только тогда когда начнете писать непосредственно под тот или иной микроконтроллер и писать не скрипты а реальный код на С/C++
|
| |
| |
| sneg555 | Дата: Суббота, 02.02.2013, 05:42 | Сообщение # 120 |

Группа: Пользователь
Сообщений: 221
Награды: 1
Статус: Offline
Город: Украина
| Цитата (Konstrukt0r) И ещё вопрос по поводу поведения контроллера на морозе. Юрий утепляет контроллер, но я думаю, это утепление спасает только на первое время, до включения. Потом если минут 20 летать, он точно охладится, никакое утепление не поможет, источника тепла-то нет. Может, достаточно держать подвеску в тепле и запускать контроллер на земле, пока тёплый?
Сервы не укутывал, работали нормально без сбоев. Акумы ставил Эти 2 штуки, вес не чуствуется, хватает вылетов на 10.
|
| |
| |